
Lyapunov-based Steer-by-Wire Control
The automotive Tier 1 supplier for steering systems "thyssenkrupp Presta AG" decided to build a modular research vehicle equipped with a Steer-by-Wire system in order to investigate the requirements and challenges with a missing mechanical connection between steering wheel and steering rack. The position control of the steering rack was controlled by a Lyapunov-based nonlinear controller, developed by the founder of SIGICONTROL, and tested on the prototype vehicle under real conditions.

(click to enlarge)
Vertical Divider
|

Vertical Divider
|
|
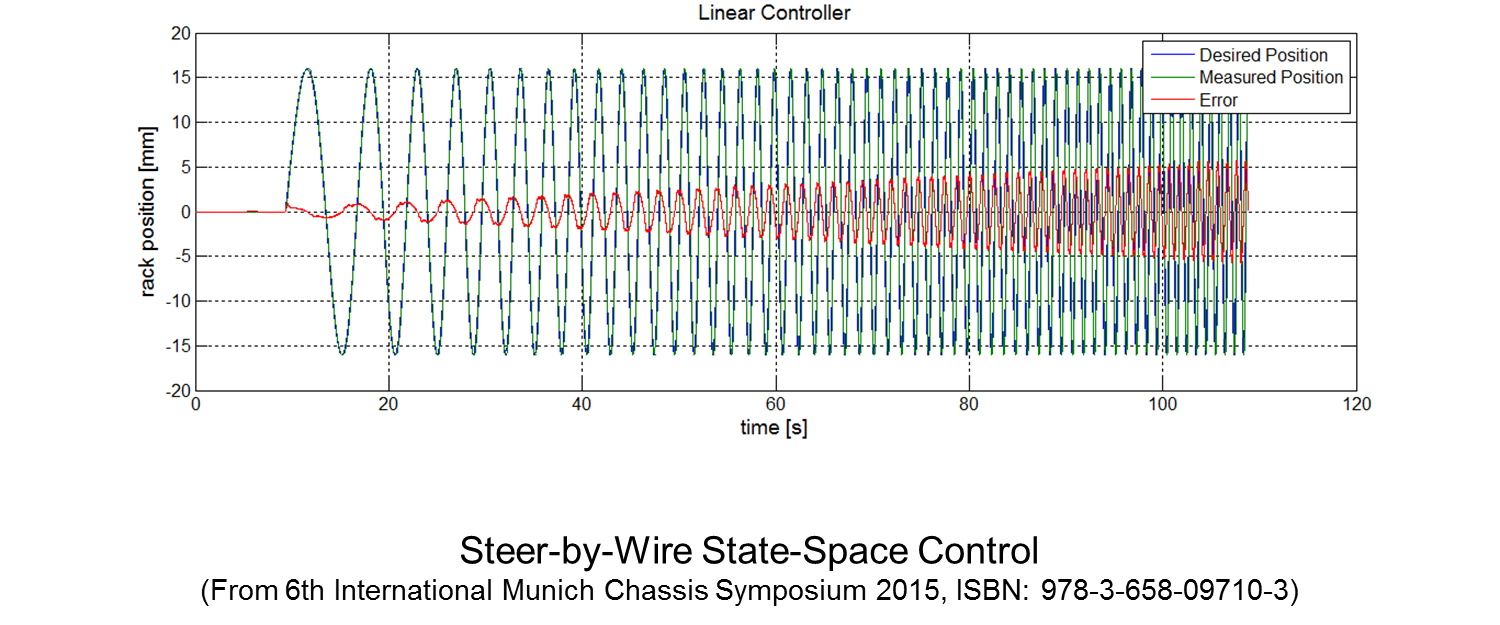
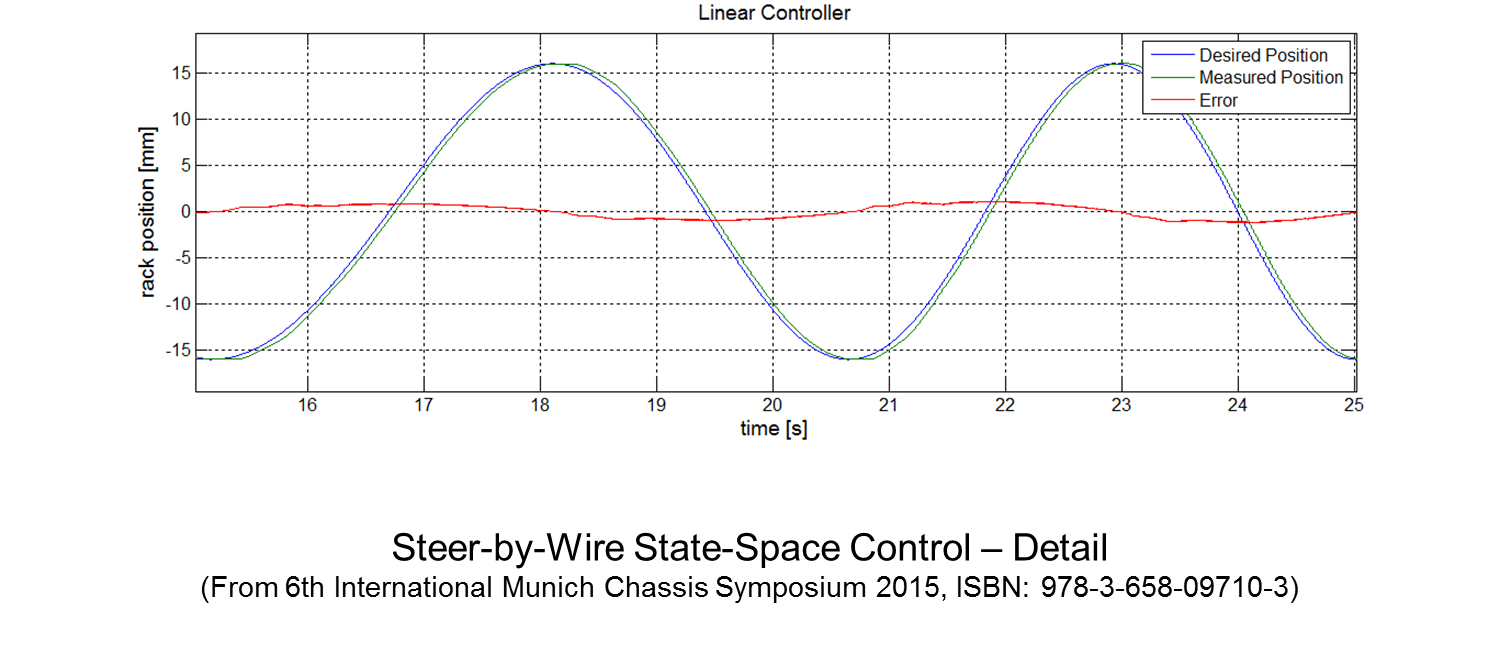
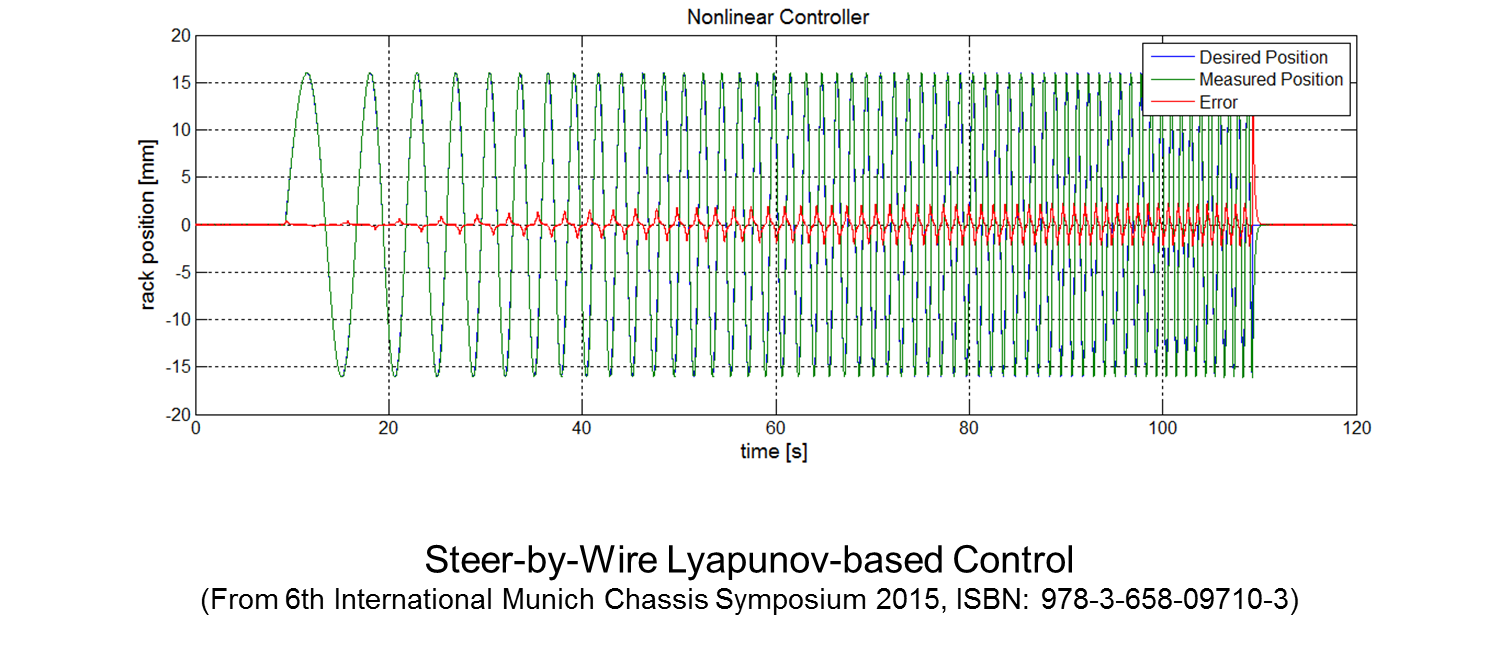
In order to illustrate the achievable improvements in performance for the same system with a simple changing of control algorithm, a comparison between a conventional state-space controller and the Lyapunov-based nonlinear controller was carried out on a test bench with the following results
(click to enlarge)
(click to enlarge)
Vertical Divider
|
(click to enlarge)
(click to enlarge)
|
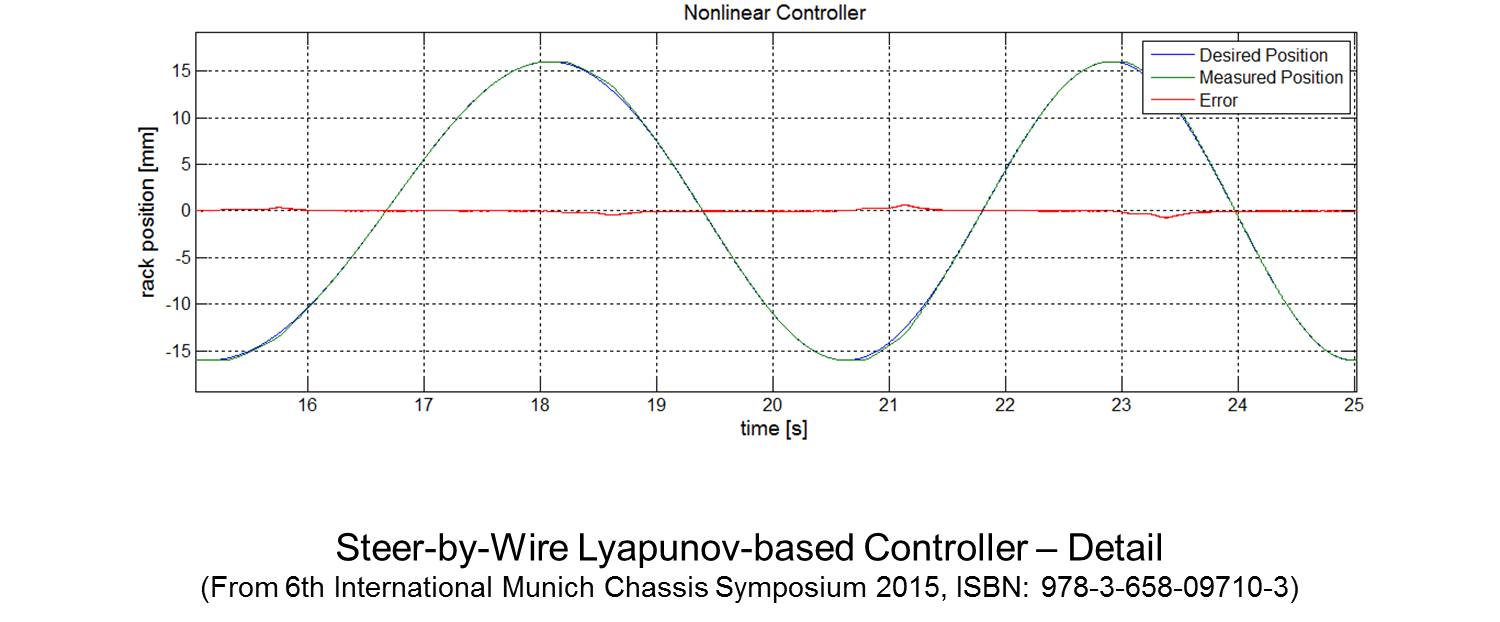
Also the road tests with the Lyapunov-based rack control system showed excellent tracking performance as can be seen from a portion of the test data below

(click to enlarge)